
-"يمكنني أن أسميهم لابوري، لكن هذا يوحي بدلالة الكتب بعض الشيء"
- " أطلق عليهم اسم الروبوتات، إذن" - كاتب مسرحية R.U.R الشهيرة
هكذا كانت قصة إطلاق اسم الروبوتات على الرجال الآليين -أو الإنساليين كما في بعض المقالات- وِفقًا لمقالةٍ نشرتها Lidove Noviny في عام 1933. تتخطى الروبوتات كونها مجرد خيال علمي لتتجسد بشكل متزايد في عالمنا الحديث. هذه الآلات ليست مجرد قطع معدنية، بل هي أنظمة معقدة تتكون من مكونات عديدة متخصصة. فهم آلية عمل هذه المكونات يكشف النقاب عن روعة التكامل بين الهندسة الميكانيكية، والإلكترونيات، والبرمجيات ليمنح هذه الروبوتات الحياة.
في هذه المقالة، نغوص في عالم مكونات الروبوت، نستكشف وظائفها المختلفة، وندرك كيف تساهم في قدرات الروبوت الشاملة. من المحركات التي تدفع الحركة، إلى المستشعرات التي تجمع المعلومات، وصولًا إلى أنظمة التحكم فائقة التطور— يكمن سر الروبوتات في هذه الأجزاء.
مكونات الروبوت
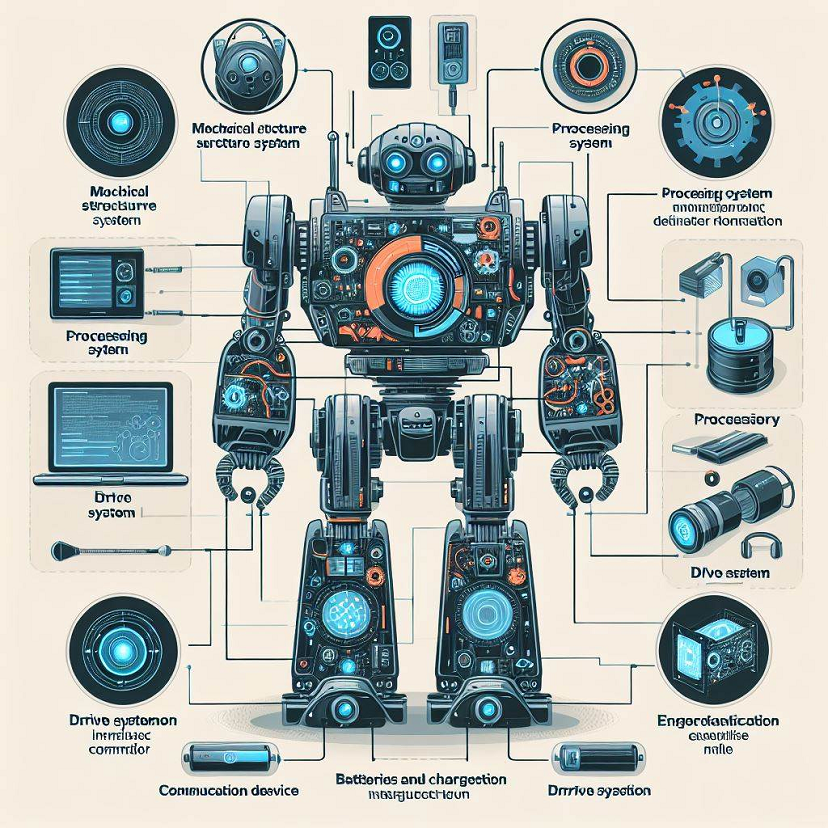
يمتلئ عالم الروبوتات بالتعقيد والإبداع، ويكمن أساس تشغيل هذه الآلات الرائعة في مكوناتها الأساسية. تمامًا كالأعضاء التي تعمل معًا في جسم الإنسان، فإن كل مكون من مكونات الروبوت يُؤدي دورًا محددًا.
تتضمن مكونات الروبوت الأساسية المحركات التي تمنحها القدرة على الحركة، والمستشعرات التي تساعدها على إدراك محيطها، وأنظمة التحكم التي تدير عملياتها المعقدة. بالإضافة إلى ذلك، هناك مكونات أخرى مهمة مثل البطاريات التي تزودها بالطاقة، والهياكل التي توفر لها الدعم.
-
نظام الهيكل الميكانيكي
نظام الهيكل الميكانيكي هو الأساس الذي يرتكز عليه الروبوت، فهو يمنحه شكله وقوته ومدى حركته. تشمل أجزاء هذا الهيكل الروابط والمفاصل والمُشغّلات (Actuators) وغيرها من المكونات المترابطة. تتنوع المواد المستخدمة لبناء هذا الهيكل بشكل كبير لتلائم الغرض من الروبوت، من البلاستيك والمعادن الصلبة إلى المواد المرنة والقابلة للتشكيل.

يحدد تصميم الهيكل الميكانيكي قدرات الروبوت بشكل مباشر. قد تُصمم الروبوتات العاملة في المصانع بهياكل شديدة الصلابة للتعامل مع الأحمال الثقيلة بدقة متناهية، بينما تتطلب الروبوتات المصممة للتفاعل البشري أو التنقل في بيئات محدودة هياكل أكثر انسيابية ومرونة من ناحية الشكل والحركة. بشكلٍ عام؛ تصميم الهيكل الميكانيكي للروبوت هو عملية دقيقة توازن بين القوة وخفة الوزن ومدى الحركة المطلوب وِفقًا للاستخدام المحدد للروبوت.
-
الجهاز الحسي - المستشعرات
تعتبر المستشعرات بمثابة عيون الروبوت وآذانه، فمن خلالها يتمكن من إدراك العالم المحيط به والتفاعل معه. تتعدد أنواع المستشعرات المتخصصة بشكل كبير، ومن أهمها:
- مستشعرات القرب واللمس: لقياس المسافات والتعرف على العوائق، ما يساهم في التنقل الآمن والحماية.
- مستشعرات الضوء، ودرجة الحرارة، والضغط: لرصد العوامل البيئية المختلفة ومعرفة التغيرات المحيطة بالروبوت.
- الكاميرات والميكروفونات: تمكن الروبوت من معالجة الصور وفهم المشاهد، والتعرف على الأصوات والكلام البشري.
تُعدّ المستشعرات من المكونات الحيوية للروبوت الحديث. فبدونها، ستكون الروبوتات بمثابة الآلات العمياء والصماء التي تعمل بدون إدراك للبيئة المحيطة. وبتطور تقنيات الحساسات، تتسع قدرات الروبوتات بشكل كبير، ما يسمح لها بالعمل في بيئات أكثر تعقيدًا وتنفيذ تفاعلات أكثر طبيعية مع العالمين المادي والإنساني.
اقرأ/ي أيضًا:
-
نظام المعالجة
يُمثل نظام المعالجة للروبوت "عقله الإلكتروني". فهو الذي يتحكم في جمع البيانات الواردة من المستشعرات، وتحليلها، وإصدار القرارات بناءً عليها. ويتكون نظام المعالجة عادةً من:
- وحدات المعالجة: تتضمن وحدات معالجة مركزية (CPUs) أو وحدات معالجة رسومية (GPUs) مخصصة للذكاء الاصطناعي، والتي تُنفِّذ العمليات الحسابية الضرورية.
- الذاكرة والتخزين: تستخدم لتخزين البرامج والبيانات المؤقتة اللازمة لعمل الروبوت.
- البرمجيات: تشمل أنظمة التشغيل والخوارزميات وبرامج التحكم التي تحدد سلوك الروبوت وتسمح له بالتفاعل مع البيئة المحيطة.
يتحدد مدى تعقيد نظام المعالجة وِفقًا لوظيفة الروبوت المطلوبة. ففي الروبوتات البسيطة المخصصة لمهام مكررة، قد يكون النظام بسيطًا بشكلٍ نسبي. أما الروبوتات التي تعمل في بيئات ديناميكية، أو تتطلب عمليات اتخاذ قرارات معقدة فتحتاج إلى أنظمة معالجة متطورة للغاية قادرة على التعلم من الخبرات السابقة والتكيُّف بسرعة مع الظروف المتغيرة.
-
نظام التحكم
يُعد نظام التحكم حلقة الوصل بين "دماغ" الروبوت (نظام المعالجة) وبقية أجزائه الميكانيكية. حيث يعمل على ترجمة التعليمات الصادرة من وحدة المعالجة إلى إشارات وأوامر تحرك العناصر الميكانيكية للروبوت بشكل دقيق. تشمل مكونات هذا النظام الأساسية:
- أجهزة تحكم (Controllers): تتلقى التعليمات من نظام المعالجة وتصدر الإشارات اللازمة للمحركات والمكونات الأخرى.
- المُشغلات (Actuators): وهي العنصر المسؤول عن تحويل الإشارات الكهربائية إلى حركة ميكانيكية (مثل المحركات بأنواعها).
- مستشعرات التغذية الراجعة: توفر معلومات حول حالة الروبوت وحركته، ما يسمح لنظام التحكم بإجراء التعديلات للحفاظ على مسار الحركة بدقة.

يعتمد مدى تعقيد نظام التحكم على نوع الروبوت ودرجة الحرية المطلوبة في حركته. بعض الروبوتات ذات المهام المتكررة تعمل بنظم تحكم تعتمد على التوجيهات المبرمجة مسبقًا. وهناك أنواع أخرى متقدمة من الروبوتات تستخدم تقنيات الذكاء الاصطناعي لتمكينها من اتخاذ قرارات التحكم بشكل مستقل وبناءً على ما تدركه من البيئة المحيطة. وبهذا يعمل نظام التحكم على تسخير كامل قدرات الروبوت الحركية لتنفيذ المهام الموكلة إليه.
-
نظام القيادة - المحرك
تعتبر أنظمة القيادة في الروبوت مسؤولة عن تحديد طريقة حركة الروبوت وتنفيذ المهام المرتبطة بالتنقل. وهي تربط بشكل وثيق بنظم المعالجة، والتحكم، والمستشعرات في الروبوت، فمن خلالها يتم تحديد المسار الأمثل، وتجنب العوائق، وتوجيه المحركات والمشغلات لتوجيه العجلات أو الأطراف بدقة.
- تحليل مسار الحركة: باستخدام خوارزميات ذكية، تُحلل أنظمة القيادة البيانات من المستشعرات لتحديد المسار الأمثل للوصول من نقطة البداية إلى الوجهة المحددة.
- تجنب العوائق: تعتمد على تقنيات الرؤية الحاسوبية والمستشعرات المتنوعة لتحديد العوائق وتقدير حجمها وموقعها، مما يسمح للروبوت بتجنب الاصطدامات بفعالية.
- توجيه المحركات: تترجم أنظمة القيادة التعليمات الصادرة من أنظمة المعالجة والتحكم إلى إشارات تحكم دقيقة، تضمن عمل المحركات والأجهزة الدوارة (مثل العجلات والأذرع) بتناغم لتحقيق الحركة المطلوبة.
تتنوع أنظمة القيادة بشكل كبير حسب نوع الروبوت وبيئة العمل. فبعض الروبوتات الصناعية الثابتة لا تحتاج إلى نظام قيادة بالمعنى التقليدي، بينما الروبوتات المتحركة تتطلب أنظمة قيادة شديدة التعقيد لاستشعار محيطها وتحديد مسارات الحركة ضمنه. ومع تقدم تقنيات الذكاء الاصطناعي، ظهرت روبوتات قادرة على التعلم من خبراتها السابقة والتكيف بسرعة مع التغيرات في بيئة العمل، مما ينعكس على أنظمة القيادة التي تزداد استقلالية وأمانًا.
اقرأ/ي أيضًا:
-
نظام التفاعل البيئي - أدوات الاتصال
تمثل أدوات الاتصال جسرًا يربط الروبوت بالعالم الخارجي، سواء مع البشر، أو مع أجهزة أو روبوتات أخرى. تشكل هذه الأدوات أهمية كبيرة خاصة في حال كان الروبوت مصممًا للعمل بشكل تعاوني مع البشر أو الروبوتات الأخرى. وتعتمد هذه الأدوات على تقنيات الاتصال المتنوعة مثل:
1. تقنيات الاتصال اللاسلكي:
- شبكات Wi-Fi: تسمح للروبوت بالاتصال بالإنترنت والأجهزة الأخرى لاسلكيًا.
- Bluetooth: تقنية لاسلكية قصيرة المدى لتوصيل الروبوت بأجهزة أخرى مثل الهواتف الذكية أو الأجهزة القابلة للارتداء.
- شبكات 5G: توفر سرعات نقل بيانات عالية جدًا واتصالًا موثوقًا به للروبوتات.
2. مستشعرات الصوت والصورة:
- التعرف على الأوامر الصوتية: تسمح للروبوت بفهم الأوامر الصادرة من البشر وتنفيذها.
- فهم لغة الجسد: تمكن الروبوت من تفسير حركات الإنسان وردود أفعاله بشكل أفضل.
- معالجة المشاهد: تحليل الصور ومقاطع الفيديو لفهم البيئة المحيطة.
3. واجهات المستخدم:
- شاشات تعمل باللمس: تتيح للمستخدمين التفاعل مع الروبوت مباشرةً.
- مكبرات صوت: تُستخدم لإصدار التعليمات الصوتية أو لتشغيل الموسيقى.
- وسائل تفاعل أخرى: مثل الأزرار، أو لوحات المفاتيح، أو الإيماءات.
اقرأ/ي أيضًا:
-
بطاريات وأداة شحن
تعد البطاريات ومعدات الشحن من أهم مكونات الروبوتات المتنقلة، فهي التي تمنحها الاستقلالية في الحركة. وتعتمد هذه البطاريات غالبًا على تقنيات الليثيوم أيون (Lithium-Ion) أو غيرها من التقنيات المتقدمة القابلة لإعادة الشحن، مما يوفر عمرًا طويلًا للبطارية وإمدادًا مستمرًا للطاقة اللازمة للروبوت.
يختلف حجم ونوع البطاريات باختلاف الروبوت وتطبيقه. فالروبوتات ذات المهام البسيطة تحتاج إلى بطاريات أصغر وأخف، بينما تتطلب الروبوتات العاملة في مجالات الصناعة أو الطيران بطاريات كبيرة ذات قدرة تخزين عالية. ويوفر نظام إدارة الطاقة والبطاريات في الروبوت مراقبة لحالة البطارية ومؤشرات الشحن، وعادة ما يقترن هذا النظام بأجهزة شحن مصممة خصيصًا لضمان التزود السريع والآمن للروبوت بالطاقة.
في هذه المقالة خضنا رحلة شيّقة لاستكشاف المكونات الأساسية للروبوتات، تلك الأجزاء التي تمنحها القدرة على الحركة، والإدراك، والتصرف ضمن بيئتها. تطور كل مكون من هذه المكونات هو محطة مهمة في تقدم مجال الروبوتات بشكل عام.
ومن المثير أن نلاحظ كيف أن الروبوت المعاصر هو ثمرة تضافر مجالات هندسية عدة، وهذا التكامل بين الميكانيكا والإلكترونيات والبرمجيات هو ما يجعل هذه الآلات قادرة على إبهارنا. ومع استمرار وتيرة الابتكار في كل هذه المجالات، لا شك أننا نتطلع إلى مستقبل تنتشر فيه الروبوتات بأشكال لا تخطر لنا اليوم على بال.